

Efforts transmissible dans une liaison
Préambule
Un système technique est composé d'un ensemble de pièces plus ou moins nombreuses qui peuvent avoir des mobilités plus ou moins importantes les unes par rapport aux autres. En fonction des déplacements recherchés ou tolérés, les différentes pièces ne seront pas liées de la même façon, elles auront donc des liaisons différentes. |  |
Objectif
Le but de cette activité est de définir les actions mécaniques transmissibles dans les liaisons. Pour cela, Par groupe de 3, vous allez étudier chaque liaison particulière et compléter les documents réponses ci-après. (Un exemple est donné dans les documents informatisé).
Le matériel à utiliser est la valise contenant les maquettes didactiques sensorielles qui permettent de constituer les différentes liaisons.
Remarque : pour des raisons de matériels, vous ne pourrez disposer d'une liaison que pendant une dizaine de minutes.
Rappel : Liaisons Mécaniques 3 dimensions
Liaison Rotule
 |
0 Traction ; 3 rotation soit 3 degré de liberté (n = 3) Torseur des actions mécanique | ||||||||||||||||

Liaison Ponctuel
 |
2 Traction ; 3 rotation soit 5 degré de liberté (n = 5) Torseur des actions mécanique | ||||||||||||||||

Liaisons Pivot-Glissant
 |
1 Traction ; 1 rotation soit 2 degré de liberté (n = 2) Torseur des actions mécanique | ||||||||||||||||

Liaison Linéaire rectiligne
 |
2 Traction ; 2 rotation soit 4 degré de liberté (n = 4) Torseur des actions mécanique | ||||||||||||||||

Liaison Linéique circulaire
 |
1 Traction ; 3 rotation soit 4 degré de liberté (n = 4) Torseur des actions mécanique | ||||||||||||||||

Liaisons Glissière
 |
1 Traction ; 0 rotation soit 1 degré de liberté (n = 1) Torseur des actions mécanique | ||||||||||||||||

Liaison Hélicoïdale
 |
1 Traction ; 1 rotation soit 1 degré de liberté (n = 1) les deux mouvements sont liés par le pas Torseur des actions mécanique | ||||||||||||||||
Liaison Pivot d'axe x
 |
0 Traction ; 1 rotation soit 1 degré de liberté (n = 1) Torseur des actions mécanique | ||||||||||||||||

Liaison Plan
 |
2 Traction ; 1 rotation soit 3 degré de liberté (n = 3) Torseur des actions mécanique | ||||||||||||||||

Complément : Liaisons Mécanique 2 Dimensions
Encastrement
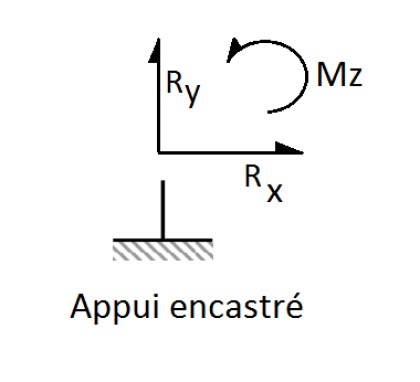 |
0 Traction ; 0 rotation soit 0 degré de liberté (n = 0) Torseur des actions mécanique | ||||||||||||||||

Appui simple
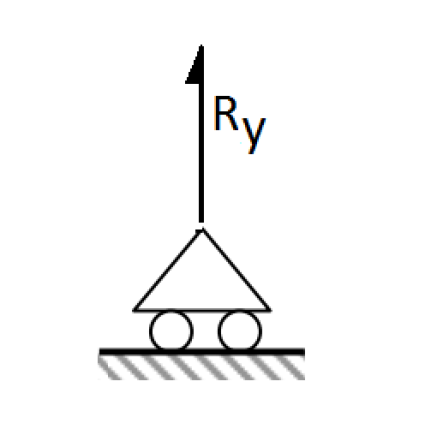 |
1 Traction ; 1 rotation soit 2 degré de liberté (n = 2) Torseur des actions mécanique | ||||||||||||||||

Appui double
 |
0 Traction ; 1 rotation soit 1 degré de liberté (n = 1) Torseur des actions mécanique | ||||||||||||||||





